Bill of Materials











Required Libraries
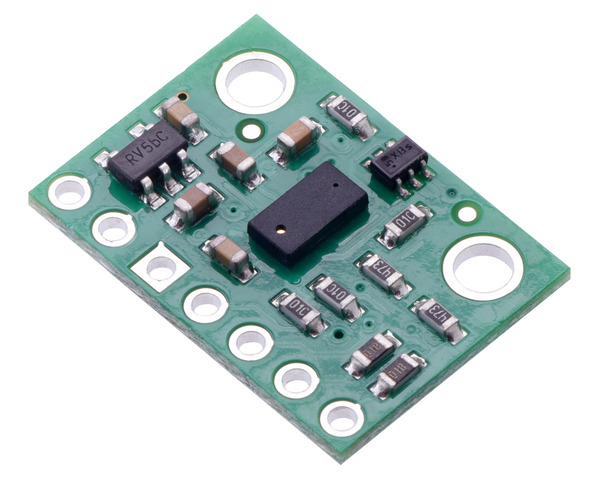
One external library is required for the T-O-F sketch. Download and copy the ‘VL53L0X-arduino-master’ folder to program files/arduino/libraries.
Click here to download the VL53L0X library
T-O-F Sensor Arduino Code
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 | /* || -height-detecting iPad slider sensor control || -version 1.0 || -author Ed Rees || -11/28/2017 || -copyright Saunders Machine Works, LLC 2017 */ #include <Wire.h> #include <VL53L0X.h> VL53L0X sensor; // time-of-flight (LIDAR) height sensor. VL53L0X sensor2; // time-of-flight (LIDAR) person sensor. void setup() { pinMode(2, OUTPUT); pinMode(3, OUTPUT); pinMode(4, OUTPUT); pinMode(5, OUTPUT); digitalWrite(2, LOW); digitalWrite(3, LOW); digitalWrite(4, LOW); digitalWrite(5, LOW); delay(500); Wire.begin(); pinMode(4, INPUT); sensor.init(true); // initialize person sensor. sensor.setAddress((uint8_t)22); // set i2c address of person sensor. pinMode(5, INPUT); sensor2.init(true); // initialize height sensor. sensor2.setAddress((uint8_t)25); // set i2c address of height sensor. sensor.init(); // reinitialize person sensor with new i2c address. sensor.setTimeout(500); sensor.startContinuous(100); // begin sensing at 100mS intervals. sensor2.init(); // reinitialize height sensor with new i2c address. sensor2.setTimeout(500); sensor2.startContinuous(100); // begin sensing at 100mS intervals. } void loop() { if (sensor2.readRangeContinuousMillimeters() <= 1100) // person sensing. { digitalWrite(2, HIGH); } else { digitalWrite(2, LOW); } if (sensor.readRangeContinuousMillimeters() <= 1100 ) // height sensing. { digitalWrite(3, HIGH); } else { digitalWrite(3, LOW); } } |
iPad Stepper Arduino Code
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 | /* || -height-detecting iPad slider stepper control || -version 1.0 || -author Ed Rees || -11/28/2017 || -copyright Saunders Machine Works, LLC 2017 || -credit to Rob Hebing (robhebing.nl) for stepper functions. */ #define nrOfSteppers 1 //the number of steppermotors connected to arduino const int stepperDirectionPin[nrOfSteppers] = {8}; //the pins of the steppers that control the direction const int stepperPulsePin[nrOfSteppers] = {6}; //the pins of the steppers that control the pulse int pers = 2; // person sensor pin. int height = 3; // height sensor pin. int Home = 11; // home switch pin. int pwr = 12; // stepper power relay (power switch tail) control. bool trigger = false; // records initial motion trigger bool top = false; // holds iPad carrier at top of motion int initStepDelay = 65; // stepper speed lower limit. value represents ms delay between steps. (higher = slower). float stepDelay = initStepDelay; // initializes step delay equal to initial value. float minStepDelay = 10; // stepper speed upper limit. value represents ms delay between steps. (lower = faster). float accelRate = .2; // controls acceleration slope. (higher = faster acceleration speed). void setup() { for (int s = 0; s < nrOfSteppers; s++) // set stepper output pins. { pinMode(stepperDirectionPin[s], OUTPUT); digitalWrite(stepperDirectionPin[s], LOW); pinMode(stepperPulsePin[s], OUTPUT); digitalWrite(stepperPulsePin[s], LOW); } pinMode(pers, INPUT); pinMode(height, INPUT); pinMode(Home, INPUT); pinMode(pwr, OUTPUT); } void loop() { if (digitalRead(pers) == HIGH) // if a person is detected, supply power to stepper driver - else remove power and reset trigger and top. { digitalWrite(pwr, HIGH); } else { digitalWrite(pwr, LOW); top = false; trigger = false; } while (digitalRead(pers) == HIGH && digitalRead(height) == HIGH && top == false) // while height sensor detects person and iPad is not at top of motion, move iPad upward. { trigger = true; stepper(0, 15, 1); // move 15 steps upward. if (stepDelay >= minStepDelay) // simple linear acceleration method. { stepDelay = stepDelay - accelRate; // every cycle through this while loop, the step delay is reduced by accelRate until minStepDelay is reached. } } if (trigger == true && digitalRead(height) == LOW) // if scaning cycle has been triggered, and height sensor no longer detects person. { trigger = false; top = true; } while (top == true && digitalRead(pers) == HIGH) // hold at top while person is detected. { delay(100); } while (digitalRead(pers) == LOW && digitalRead(Home) == LOW) // once person is no longer detected, move downward until home switch is triggered. { if (top == true) { top = false; stepDelay = initStepDelay; // reset stepper speed to lower limit for return motion and for next operation cycle. } stepper(0, 5, 0); // move downward 5 steps per pass through while loop. } if (digitalRead(Home) == HIGH) // once home switch is triggered, reset relvant variables and remove stepper power. { delay(1000); digitalWrite(pwr, LOW); } } // stepper functions below. credit to Rob Hebing (robhebing.nl). void(* resetFunc) (void) = 0; //declare reset function @ address 0 void stepper(int motor, int steps, boolean stepDirection) { int currentDirection = digitalRead(stepperDirectionPin[motor]); // first check the direction, if it's not the current direction change it. if (stepDirection != currentDirection) { digitalWrite(stepperDirectionPin[motor], stepDirection); delay(500); // this delay makes the motor stop for a while when changing direction } for (int s = 0; s < steps; s++) // a for loop to create the pulse { digitalWrite(stepperPulsePin[motor], LOW); //the LOW, then HIGH creates the pulse the driver is waiting for, no delay needed. digitalWrite(stepperPulsePin[motor], HIGH); delayMicroseconds(stepDelay); //this delay creates the pulse, the lower the number the faster the pulse. } } |